(Zahnrad-) Getriebe sind faszinierend – sie vergrößern rein mechanisch das Drehmoment oder sorgen für eine definierte Umdrehungsgeschwindigkeit einer Achse. Und sind dabei nichts anderes als die kontinuierliche Anwendung des Hebelgesetzes. Im fischertechnik-System gibt es aber nur eine ausgewählte Anzahl an Zahnrädern: mit 10, 15, 20, 30 und 40 Zähnen (Z10 bis Z40) – sowie ein paar Sonderfällen wie dem Drehkranz (Z58) oder dem Kegelzahnrad (Z12). Damit lassen sich nur eine begrenzte Auswahl von Stirnradgetrieben konstruieren.
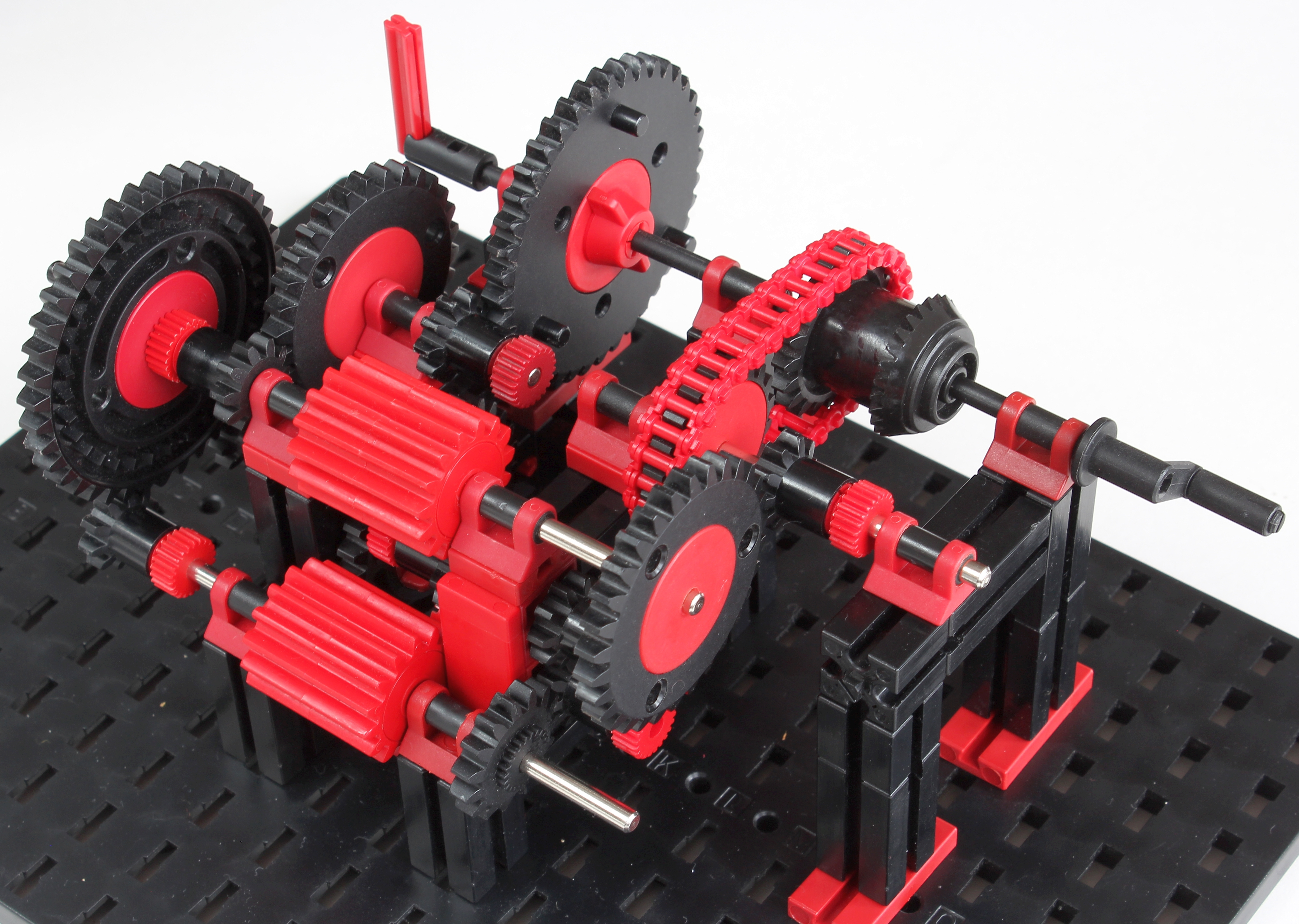
Tatsächlich geht aber viel mehr – dank des Differentialgetriebes [1]. Koppelt man den Differentialkäfig z (bei fischertechnik ein Z15 (alt) oder ein Z20) mit der Abtriebsachse, dann entstehen ganz neue Übersetzungsverhältnisse zwischen Antrieb x und Abtrieb y. Denn x, y, und z stehen beim Differential immer im Verhältnis x+y = 2z. Will man eine Übersetzung wie beispielsweise x = 31y mit einem Differentialgetriebe konstruieren, muss gelten: x+y = 32y = 2z, also 16y =z. Differentialkäfig z und Abtriebsachse y müssen dazu über eine Übersetzung 1:16 verbunden werden – Z10 zu Z20 und nochmal Z10 zu Z20 und einmal Z10 zu Z40 (siehe [2]).
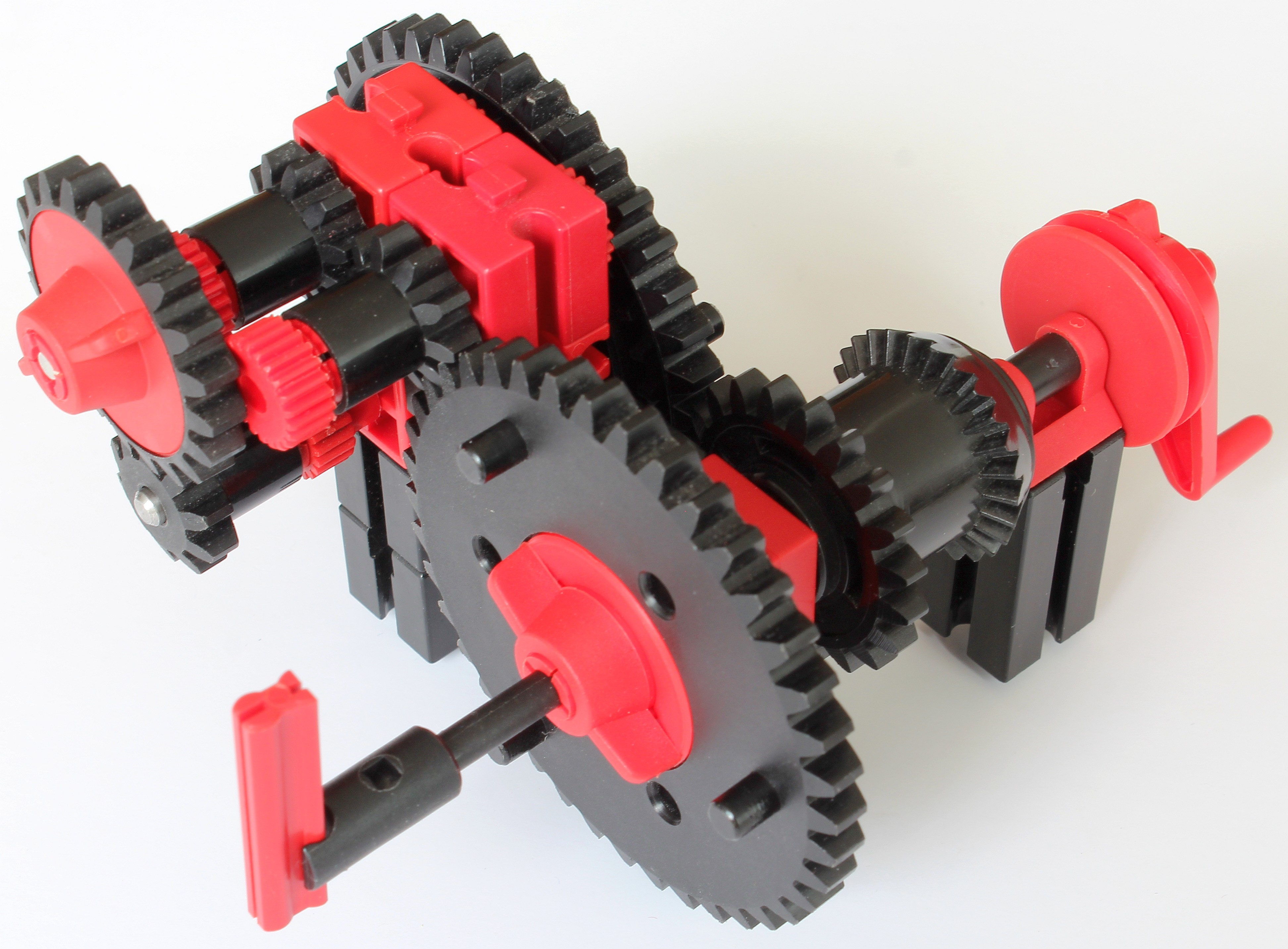
Solche Differentialgetriebe lassen sich koppeln – und damit auch große (prime) Übersetzungsverhältnisse konstruieren, so z. B. das Verhältnis 1:2953 (siehe [3]).
Auf diese Weise lassen sich z. B. Getriebe für ein Planetarium [4] konstruieren. Tatsächlich kann so jedes ganzzahlige Übersetzungsverhältnis als Getriebe konstruiert werden. Das resultierende Getriebe ist meist nicht die kompakteste Lösung – aber es lässt sich mit fischertechnik-Zahnrädern aufbauen, und hat dank der „Rückkopplung“ zwischen Differentialkäfig und Abtriebsachse praktisch kein Spiel.

{kind=link}
kommentieren