Die Konstruktion von Laufrobotern, die sich an unwegsamen Unglücksorten (z. B. nach einem Erdbeben oder einer Explosion) oder in lebensfeindlichen Umgebungen (z. B. auf anderen Planeten) trotz Hindernissen souverän bewegen können, ist seit langen Jahren Gegenstand der Robotik-Forschung. Oft nehmen die Konstrukteure Anleihen aus der Natur: Dann sehen die Roboter eher wie Spinnen oder Käfer... Continue Reading →
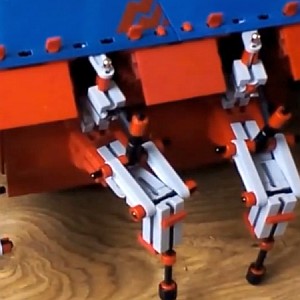
Wie fischertechniker einen Laufroboter konstruieren.

{kind=link}