Die Entwicklungsumgebung ROBO Pro ist von fischertechnik leider offiziell „abgekündigt“. Aber tausende TXT und TX Controller werden nach wie vor mit ROBO Pro programmiert – aus guten Gründen.
Inzwischen hat fischertechnik auch die (rote) Infrarot-Fernsteuerung durch eine (blaue) Bluetooth-Fernsteuerung ersetzt. Hinsichtlich der Stabilität der Verbindung ist die BT-Steuerung sicherlich überlegen. In einem Aspekt punktet aber die IR-Fernsteuerung: Der TXT Controller kann die Infrarot-Signale empfangen und auswerten; sie können in ROBO Pro (ab Level 3) kinderleicht in Steuerungsprogramme integriert werden.
Dazu genügt es, ein „Eingangs“-Element auszuwählen und mit der rechten Maustaste anzuklicken. Wählt man im Konfigurationsmenu den Reiter „IR“, dann erscheint das folgende Eingabefenster.
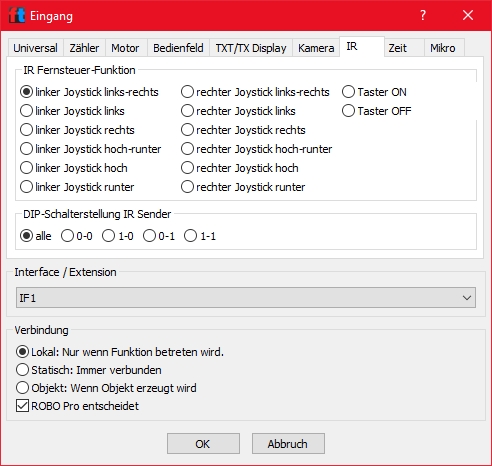
Die Joysticks liefern einen Wert von 0-15, der sich beispielsweise durch Multiplikation mit 34 in eine Motorgeschwindigkeit von 0-510 umrechnen lässt. Auch die Stellungen der DIP-Schalter werden ausgewertet, sodass bis zu acht Motoren durch je einen Joystick (über dieselbe oder auch mehrere Fernsteuerungen) oder auch ein Motor über mehrere Fernsteuerungen gesteuert werden können. Dirk Wölffel hat das in einem Beitrag in der ft:pedia 2016 sehr schön erläutert.

{kind=link}
kommentieren