Aus der Kognitionspsychologie kennen wir den Effekt, dass Menschen bei Entscheidungen von Umgebungsinformationen beeinflusst werden, ohne dass ihnen dieser Einfluss bewusst wird. Dieses Phänomen wird auch als „Anker-Effekt“ bezeichnet. Zu den Mechanismen, die auf diese Weise „verzerrte“ Entscheidungen bewirken, zählt auch die „ist-doch-klar-wie-das-geht“- oder „das-haben-wir-schon-immer-so-gemacht“-Haltung. Dafür sind vor allem auch Profis anfällig – denn natürlich will niemand jedes Mal bei Adam und Eva beginnen und jedes Vorgehen erneut auf den Prüfstand stellen. In der Regel ist Erfahrungswissen ja auch wertvoll und führt schneller zum Ziel.
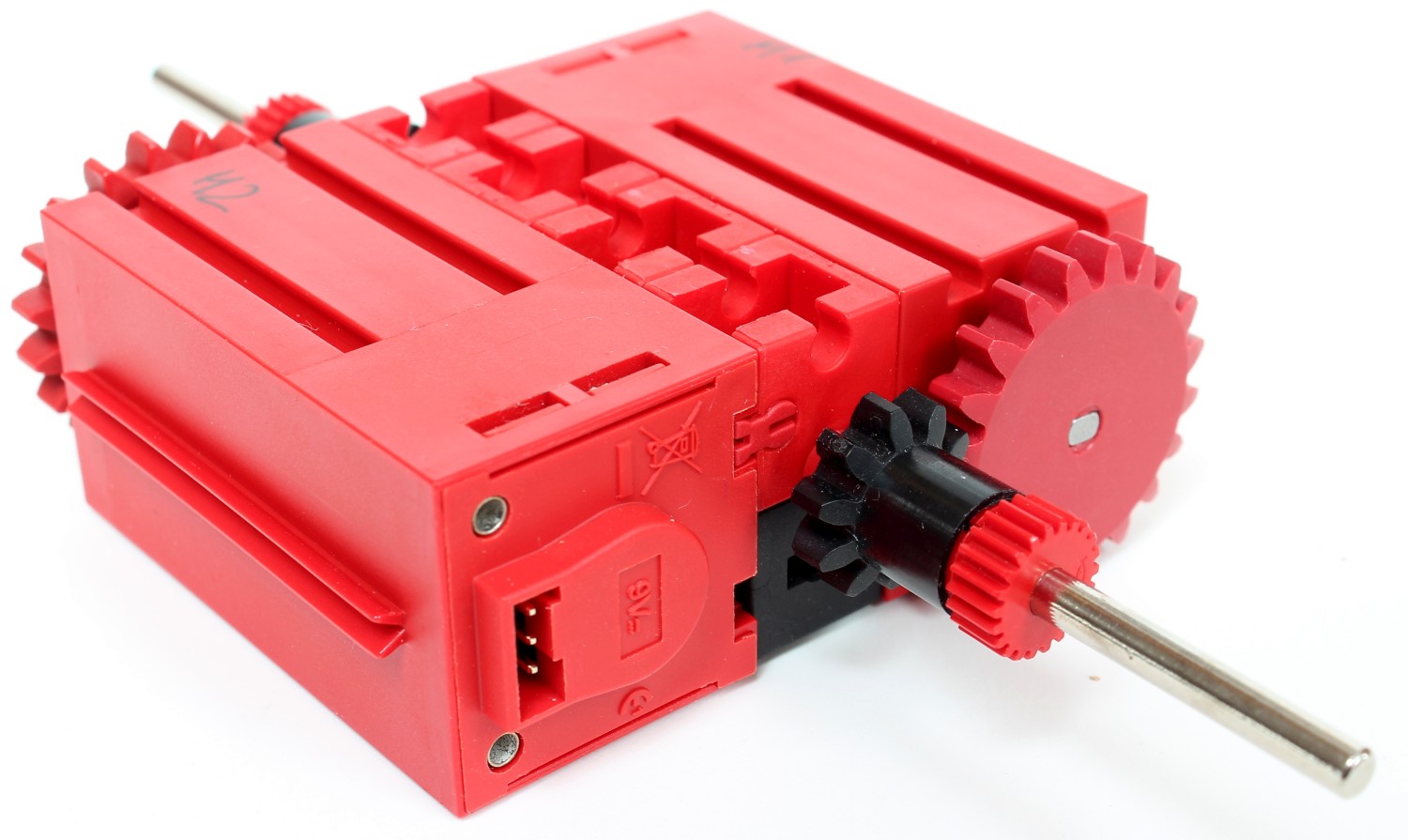
Manchmal aber auch nicht. Ein schönes Beispiel dafür liefert der aktuelle „Robotics Hightech“-Baukasten von fischertechnik. Die Mecanum-Räder der Roboter in dem Kasten werden mit Encoder-Motoren angetrieben: je Achse ein Motor. Und da die Motorwelle Rastachsen-kompatibel ist, steckt man da schön kompakt ein Rast-Z10 auf. Damit lässt sich über ein Z20 eine benachbart montierte Achse mit Mecanum-Wheel antreiben. Abb. 1 zeigt den Antrieb zweiter gegenüberliegender Achsen mit kleinen Optimierungen.
Soweit, so gut. Doch die Untersetzung 2:1 halbiert die Motordrehzahl: Aus den im Leerlauf messbaren etwa 135 U/min der Motorwelle werden 67,5 U/min an der Rad-Achse. Bei einem Radumfang von etwa 19 cm entspricht das einer Geschwindigkeit von rund 22 cm/s – Schneckengeschwindigkeit (0,8 km/h).
Eine solche Untersetzung kann sinnvoll sein, wenn wir ein hohes Drehmoment benötigen, um das Fahrzeug anzutreiben. Bei vier kräftigen Encodern benötigen wir das jedoch eher nicht – der Motor bleibt unter seinen Möglichkeiten. Denn wie René Trapp in der ft:pedia gezeigt hat, erreicht der Motor seine höchste Effizienz bei etwa 75% der Leerlaufumdrehung.
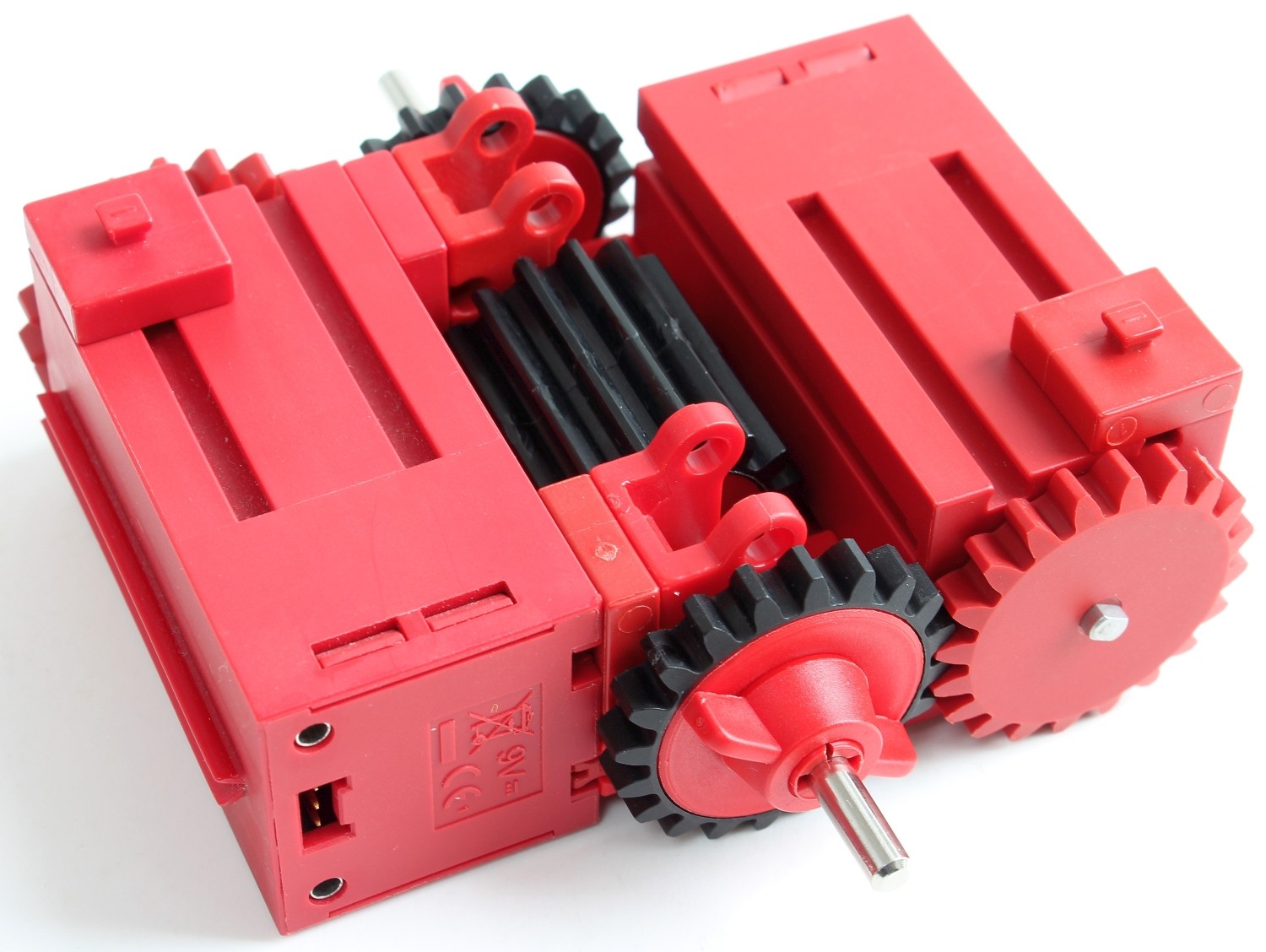
Ersetzen wir die Untersetzung durch eine 1:1-Übersetzung (Rast-Z20 auf Z20) und erhöhen wir außerdem Leichtlauf und Stabilität der Achsen durch ein altes Differential, steigt die Geschwindigkeit des Fahrzeugs prompt auf 52 cm/s. Mit 1,8 km/h immer noch keine Renngeschwindigkeit, aber immerhin. Die Geschwindigkeitssteigerung um mehr als das Doppelte verdanken wir dem Differential, das produktionsbedingte Unterschiede in der Leistung von je zwei benachbarten Motoren ausgleicht – bei der Originalkonstruktion bremst der Synchronbetrieb das gesamte Fahrzeug auf die Geschwindigkeit des langsamsten Motors.
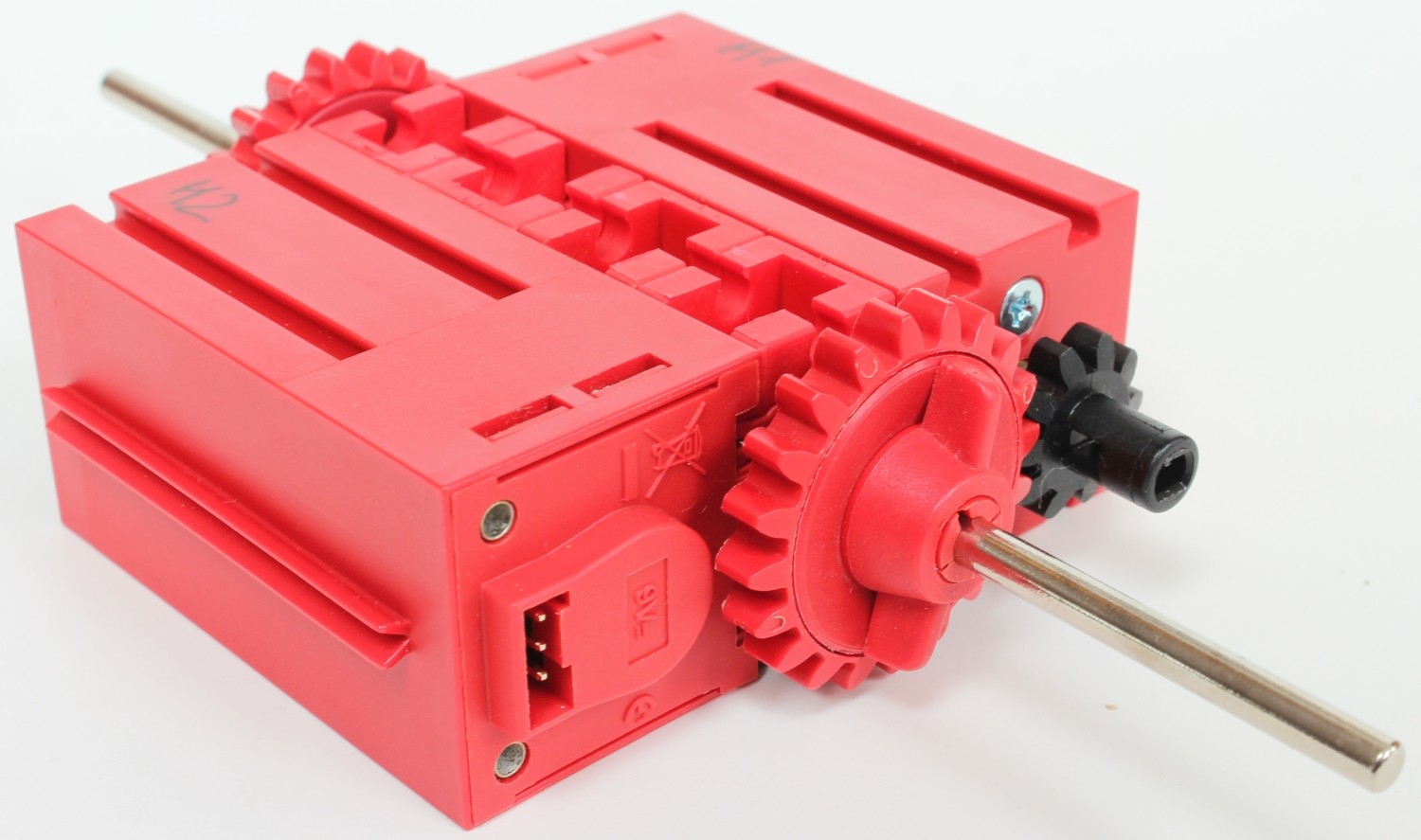
Und wenn wir schließlich in der originalen Konstruktion das Rast-Z10 durch ein Rast-Z20 ersetzen und das Z20 durch ein Z10, erhalten wir eine Übersetzung 1:2 ins Schnelle. Damit steigt die Geschwindigkeit der Radachse auf das Doppelte der Motorwelle, die immer noch über 120 U/min erreicht – und das Fahrzeug „fliegt“ geradezu mit 76 cm/s (oder 2,75 km/h).
Das ist möglicherweise noch nicht das Ende der Fahnenstange – die Konstruktion mit Differential würde auch eine 1:n-Übersetzung ins Schnelle erlauben, wenn sich auf der Motorwelle eine fischertechnik-Nabe befestigen ließe, und der Motor hat wahrscheinlich noch ein wenig „Luft nach oben“. Wer bekommt eine noch schnellere Variante hin, ohne die Motoren zu überlasten?
Eine ausführliche Darstellung des „Tunings“ der Mecanum-Roboter findet sich übrigens in Ausgabe 1/2022 der ft:pedia.

{kind=link}
kommentieren