Neben den herausragenden mechanischen Eigenschaften und Möglichkeiten, die das fischertechnik-System bietet, zeichnete es sich schon immer durch besonders innovative Anbindungen an die Welt der Mikrocontroller aus. Der erste „Computing“-Baukasten erschien 1985 (!) – mit Interfaces für die damals gängigen Heimcomputer (Schneider CPC 464/664/6128, Commodore VC 20, C64 und C128, Apple II, Atari, Amiga, Acorn) und den ersten IBM PC.
In den folgenden Jahrzehnten wurde das „Interface“ von einer relativ einfachen Schnittstelle zu einem eigenen Mikrocontrollersystem weiterentwickelt – begleitet von einer grafischen Programmiersprache, „Lucky Logic“, die fischertechnik nach und nach zu „ROBO Pro“ ausbaute: Einer ausgefeilten IDE, äußerst leistungsfähig und mit zahlreichen vorteilhaften Eigenschaften – nicht nur für den Programmiereinsteiger (siehe meine kleine Blog-Serie zu ROBO Pro).
In der fischertechniker-Community sorgte vor allem Ulrich Müller dafür, dass die verschiedenen „Interfaces“ auch mit anderen Programmiersprachen gesteuert werden konnten, darunter C++, C#, Delphi, Java, Pascal, Perl, Python und Visual Basic.
Im Jahr 2009 erschien der kleine, smarte ROBO TX Controller – und auch der hatte wieder im direkten Vergleich mit ähnlichen Produkten technisch die Nase vorn: 8 Universaleingänge, 4 Motor-Ausgänge, Encodermotoren für genaue Steuerungen, Bluetooth-Kommunikation und ab Firmware 1.30 sogar I2C-Unterstützung. An ihn ließen sich bis zu 8 weitere TX Controller anschließen und die Zahl der Ein- und Ausgänge damit verneunfachen. Ulrich Müller adaptierte seine Treiber, und so ließ sich der TX kurz darauf ebenfalls in C/C++/C#, VBA, Visual Basic, Delphi, Java und Python programmieren.
2014 kam das Nachfolgemodell des TX, der Robotics TXT Controller auf den Markt – ein ausgewachsener kleiner Computer mit einem Linux-Kernel statt einer Firmware, Touch-Display, Kamera-Unterstützung und WLAN, der erneut den Mitbewerb alt aussehen ließ.
Damit boten sich der Community zahlreiche Möglichkeiten, den Controller „aufzubohren“ und das letzte herauszukitzeln:
- Mit der „fischertechnik TXT Community Firmware“ wurden dem Linux-Kernal ein Upgrade verpasst und u. a. die von fischertechnik nicht umgesetzte SD-Karten-Unterstützung ergänzt; die aktuelle Version kann von der Webseite des Community Firmware Projekts heruntergeladen werden
- Zugleich erblickten zwei neue Programmiersprachen für den TXT das Licht der Welt:
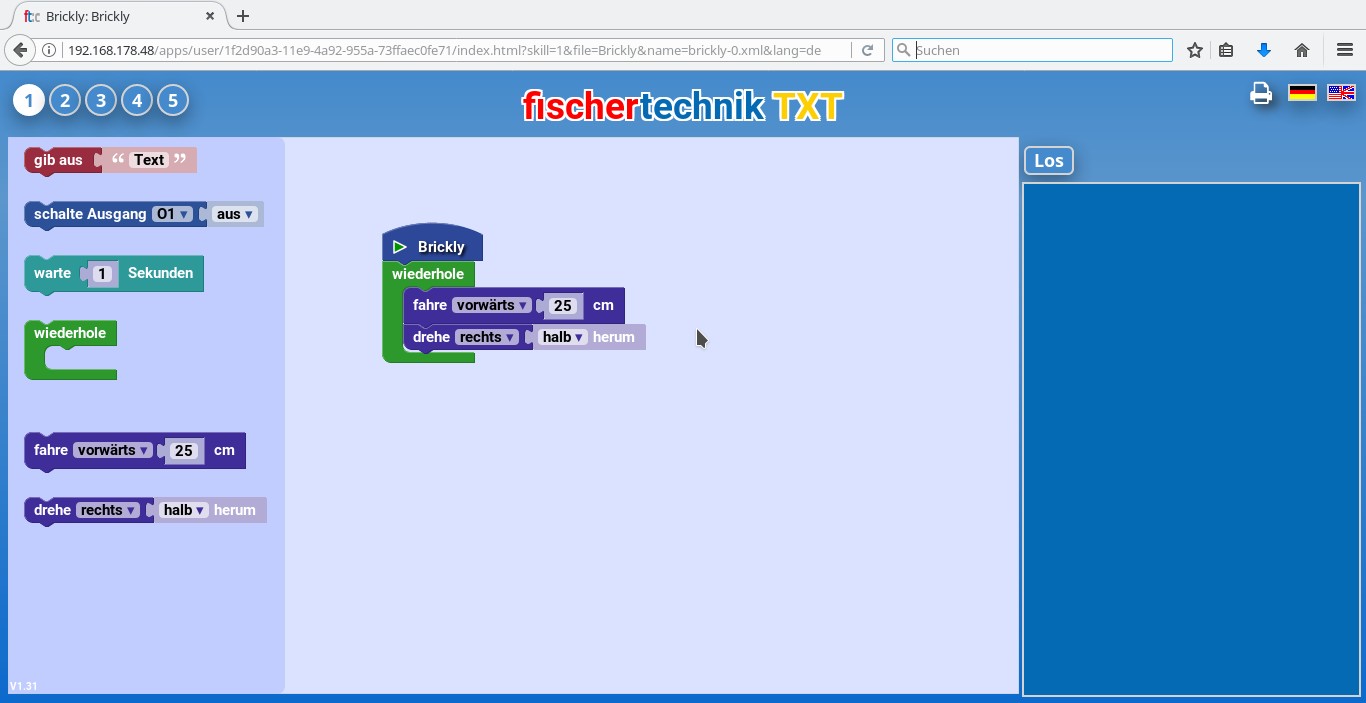
- Brickly von Till Harbaum, eine auf Googles grafischer Programmier-IDE Blockly basierende Einsteigerprogrammiersprache, die eine Programmierung des TXTs aus dem Browser ermöglicht
- Snap! von Richard Kunze, eine weitere aus dem Browser nutzbare grafische IDE
- StartIDE, eine sehr leistungsfähige Mini-Programmiersprache, mit der sich kleine Programmierprojekte direkt vom Touch-Screen des TXTs aus umsetzen lassen
- ftrobopy von Torsten Stühn erweiterte die Programmierbarkeit des TXT um Python; der ftrobopy-Treiber wird inzwischen von fischertechnik gleich mit jedem TXT ausgeliefert
fischertechnik selbst erweiterte die Programmierbarkeit des TXT 2018 durch die Unterstützung von Scratch 3 (ftScratch3).
Nur der Maker-Welt gegenüber blieben die Controller von fischertechnik verschlossen – einzig die I2C-Schnittstelle bot die Möglichkeit, in der Maker-Szene verbreitete Sensoren auch mit fischertechnik zu nutzen. Die erforderlichen I2C-Treiber für ROBO Pro mussten jedoch eigens entwickelt werden.
Diese „Lücke“ schloss Till Harbaum 2018 mit seinem ftDuino – einem zum ROBO TX Controller „Gehäuse- und Pin-kompatiblen“ Arduino (Leonardo) mit Motortreibern, kurzschlussfest und überspannungsgesichert. Der ftDuino bietet (fast) alles, was auch der ROBO TX Controller mitbringt, allerdings auf deutlich einfacherer Hardware. Er kann in C/C++ in der Arduino IDE, aber auch mit Scratch3 und Blockly programmiert werden: Ein Controller also, der sich sowohl für Programmiereinsteiger eignet als auch für Maker-Projekte mit fischertechnik-Modellen. Und die Unterstützung von ROBO Pro bindet ihn zugleich in die fischertechnik-Welt ein.

Ende des Jahres 2021 brachte fischertechnik den TXT 4.0 als Nachfolger des TXT auf den Markt – ein „Bolide“, der endlich auch Servos ansteuern kann. Statt der fischertechnik-Programmiersprache ROBO Pro wird er allerdings mit einer auf Googles Blockly-IDE basierenden Programmiersprache programmiert, ROBO Pro Coding genannt. ROBO Pro Coding übersetzt Blockly in Python und überträgt den Programmcode dann auf den TXT 4.0, wo er von einem Interpreter ausgeführt wird.
Dank der Community kann aber auch der TXT 4.0 seit Mitte 2022 mit der bewährten fischertechnik-Programmiersprache ROBO Pro programmiert werden: Torsten Stühns ftrobopy-Server erledigt auf dem TXT 4.0 die Umsetzung in Python.
Schließlich gibt es noch zahlreiche Hardware-Ergänzungen für die fischertechnik-Mikrocontroller sowie für andere gängige Mikrocontroller wie den Arduino, den BBC micro:bit oder den Raspberry Pi, die die Mikrocontroller-Welt von fischertechnik erweitern:
- den ft-Extender, der einen Anschluss von 3,3V und 5V I²C-Devices (Sensoren/Aktoren) an TX und TXT erlaubt und die unterschiedlichen Spannungen mit Level Shiftern ausgleicht;
- den ftPwrDrive, ein I²C-Schrittmotortreiber für die fischertechnik-Controller (TX/TXT) und den ftDuino, der die Ansteuerung von bis zu vier Schrittmotoren und vier Servos erlaubt (mit 12V und bis zu 4A Stromversorgung);
- das Arduino-F5-Motor-Shield von Didacta Advance, das einen Arduino Uno um vier 9V-Motoranschlüsse (in die die fischertechnik-Stecker passen) und zwei Servo-Ausgänge erweitert;
- das Arduino-Mega-F5-Motor-Shield von Didacta Advance mit sechs 9V-Motorausgängen und 12 Universaleingängen
- den micro:bit IO-F5-Adapter von Didacta Advance für den BBC Mikrocontroller micro:bit, der vier fischertechnik-kompatible 9V-Motorausgänge und 6 digital/analoge Eingänge bereitstellt
- das Kitronic Interface Board für den micro:bit, das zwei fischertechnik-kompatible 9V-Motorausgänge, zwei digitale Eingänge und zwei analoge Eingänge bereitstellt (Beispielcode)
- den TX-Pi-HAT, der einen Raspberry Pi fischertechnik-kompatibel macht – mit zwei 9V-Motorausgängen und vier digitalen Eingängen.
Damit lassen sich fischertechnik-Modelle mit jeder gängigen Programmiersprache und mit den in Schulen und Maker-Umgebungen verbreitetsten Mikrocontrollern steuern.

{kind=link}
kommentieren