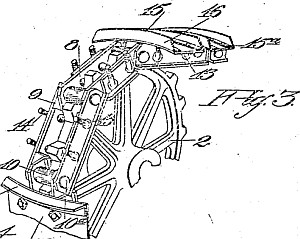
Die Gestaltung der Lenkung hat wesentlichen Einfluss auf die Manövrierbarkeit eines Fahrzeugs - Lenkradius, Leichtgängigkeit und Steuerbarkeit des Lenkeinschlags hängen direkt von der mechanischen Konstruktion ab. Zu Zeiten des (vierrädrigen) Pferdekarrens herrschte die Drehschemellenkung vor. Dabei wurde die lenkbare Vorderachse mittig am Wagen drehbar gelagert. Nachteile der (einfach zu konstruierenden) Drehschemellenkung: beide Räder haben beim... Continue Reading →
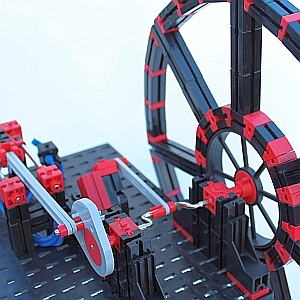
Welche Möglichkeiten es gibt, ein fischertechnik-Fahrzeug zu lenken.















{kind=link}